
Introduzione
-
-
Remove the covers, unscrew the motor housing, remove the blue cable by unscrew and pulling, open the motor block. Bring the jet in the middle position.
-
-
-
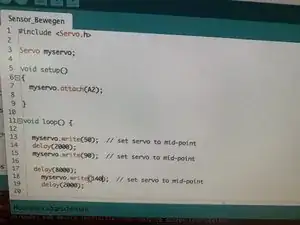
By hand or with a arduino code. The servo and the mechanics has to be both in the middle position. This needs to be done carefully.
-
-
-
With the Arduino code you can test the alignement. There is a alignment mark on the bot itself. The Servo can do 180 degrees, the robot needs around 120, so there is margin from the servo but NOT from the mechanics. If the jet mechanic is at the stop and the servo want to go further, it will end with a loss. IMHO you can dare it by just by hand.
-
-
-
Try it out. Keep in mind the bot needs some time to start all the movements. You can also try with the app with manual control.
-


Arbeite die Schritte in umgekehrter Reihenfolge ab, um dein Gerät wieder zusammenzubauen.